Models
Tip: Lego Digital Designer is FREE.
Download from
Lego.com.

All of these models are shown in
Lego Digital Designer files which is a free 3D CAD program from LEGO.
The models shown here fall into several categories: Training Bots, Accessories, and miscellaneous parts.
Instructions: At the bottom of each image is a link to download that LDD file. Depending on the capabilities of your web browser, you may need to left-click or right-click on that link to access the menu to open or save the file. If you try opening the file and it doesn't look like it worked, try the Save file option.
If you save the file to your computer, make sure you note where the file is located so that you can then open it from that location in LDD.
Did you create your own robot design and want to add it here? If so, I'd be glad to post it on the website--providing that it is an actual robot and not just a collection of parts.
Just bring the LDD file on a flash drive to the next RoboClub meeting.
Training Robots
Training Robot 1: Low Nxt Mount 1 (2-wheel drive)
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
Training Robot 2: Low Nxt Mount 2 (2-wheel drive)
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
Training Robot 3: Low Nxt Mount 3 (2-wheel drive)
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
Training Robot 4: High Nxt Mount 1
This robot uses the new LEGO steel bearing ball socket introduced with the EV3 robot. The LDD model does not yet have the ball bearing. So, a small plastic cup has been substituted. You could use a skid method or use a small caster wheel.
This model was contributed by an anonymous user--
Thanks so much!
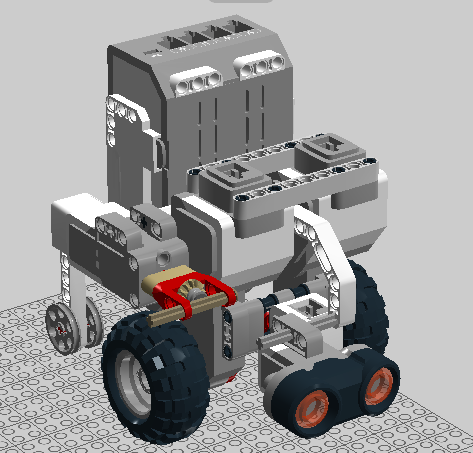
Training Robot 5: Angled Nxt Mount 1 (4-wheel drive)
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
Training Robot 6: Angled Nxt Mount 2 (2-wheel drive with caster wheel)
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
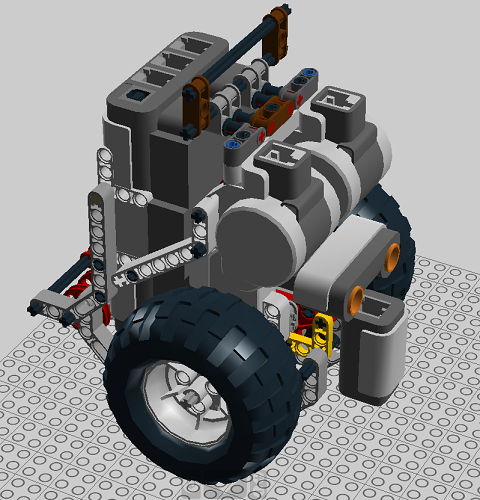
Training Robot 7: Angled Nxt Mount 3 (4-wheel drive - Tall)
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
Training Robot 8: ElephantBot
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
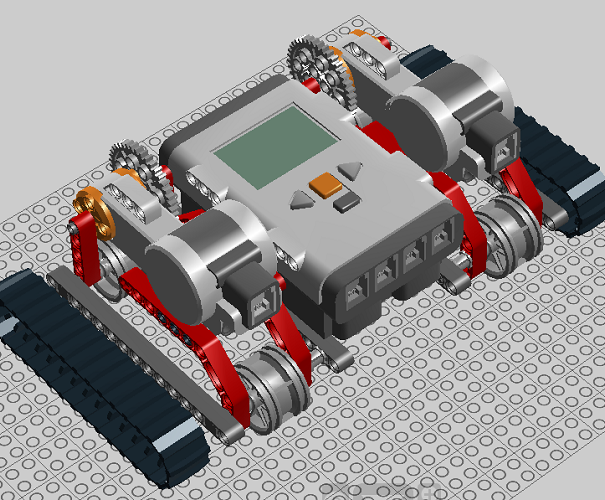
Training Robot 9: TankBot
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
Training Robot 10: TankBot
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
It may help to build this model as separate components which are attached later.
Training Robot 11: BoxBot
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
Training Robot 12: BoxBot
In this model the NXT Brick is embedded fairly deep within the robot. It is too deep to use with a USB cable. If you are using Bluetooth, then there should be no problem with this robot. If you are using a USB cable, can you re-design the robot to accommodate the USB port? What changes would you make?
Training Robot 13: BoxBot
This robot was used for training on line following.
Training Robot 14: SidewaysNxtMount 1
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
Training Robot 15: SidewaysNxtMount 2
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
Training Robot 16: SidewaysNxtMount 3
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
Training Robot 17: RearNxtMount 1
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
Training Robot 18: CompactBot
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
The bar shown at the top serves as a nice place to wrap long wires around to keep them organized and compact.
Updated design with good suggestions thanks to an anonymous user!
Training Robot 19: DinoBot
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
Training Robot 20: Compact Bot
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
Training Robot 21: Compact Bot
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
Training Robot 22: TinyBot
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
Training Robot 23: SkidBot
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
Training Robot 24: Middle NXT Mount
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
Training Robot 25: Middle NXT Mount
This robot was used for training on how to navigate a robot. Move forward x inches. Turn a certain number of degrees. etc. etc.
Training Robot 26: Sumo Bot